

KINOVA公司GEN3(新一代轻量机械臂)从安装到开发
- 分类:技术博客
- 发布时间:2020-07-03 00:00:00
- 访问量:0
一、GEN3简介
KINOVA的GEN3在国内还是非常,非常少的。先上实物图,后续有时间慢慢补。

二、安装
GEN3的安装方式与KINOVA前面几代的手臂相比较,有较大的改动,但是形式差不多。手臂与控制器可以拆分为两部分,手臂通过“插”的方式与控制器连接,通过一个夹紧扣把手臂抱死在控制器上,控制器通过螺钉拧到底座上,都是通过类似夹子的东西,把底座夹在桌子上或者其他固定点,当然也可以自己根据项目的要求,重新加工制作。具体看图:
 |
 |
|
|
 |
 |
|

通过上面几张图应该能清晰的知道手臂的安装固定方法。
三、开发
WEB APP
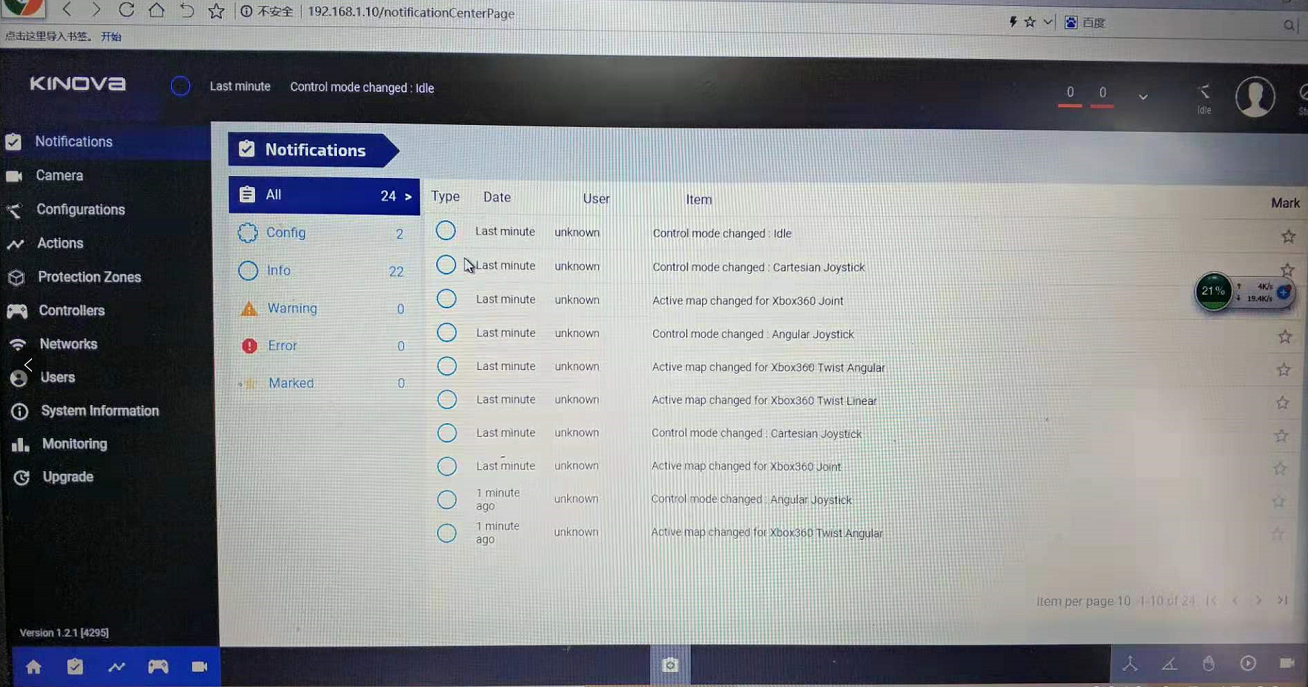
需要吐槽的是,这个登录WEB APP的浏览器,必须用Chrome!!!,而官方只说明推荐使用Chrome浏览器,一开始用别的浏览器,一直登录不上,一直找IP地址配置原因,浪费了一阵时间,还是没发现问题,果断下载推荐的浏览器,好使了,居然好使了。。。无语。
2. API 开发:API 给出了C++ 和Python的,C++中包含了windows和Linux两个系统系的API,具体使用待续使用后更新。。。。
3. ROS开发: Ubuntu下安装了ROS包,可能是新产品,ROS包还不是太成熟,折腾了一下午终于可以基本用起来了,但任然还有些BUG有待后续修复。
下载包并不是难,必须需要Protobuf这个协议,而且必须是3.5.1版本,我起初安装了2.6.1版本,源码包编译不通过,有安装了3.6.1版本,版本里面有个变量名不相同,一直编译不通过。折腾了好久,最后卸掉所有的Protobuf版本,安装了3.5.1这个版本,果然编译通过了。
官方安装包支持系统版本Ubutnu 16.04,因为我的电脑版本是18.04,上面出现的问题可能更系统版本有关。
经过一段时间的使用,Ubuntu 16.04下的安装步骤如下见个人博客文章(点击进入)
*初略记录下,详细过程稍后更新。。。 *
---------------------
作者:WEN_LG 温礼刚 维多利亚vic119官网技术总监
来源:CSDN
原文:https://blog.csdn.net/WEN_LG/article/details/88206201
版权声明:本文为博主原创文章,转载请附上博文链接!
扫二维码用手机看

Copyright © 2016-2020 维多利亚vic119官网 版权所有 辽ICP备16010227号-2